

La detección de peatones de Uber se ha visto seriamente cuestionada, luego del accidente mortal que produjera uno de estos vehículos sin conductor al dejar a una mujer muerta en Arizona.
PUBLICIDAD
Se supone que estos autos han sido especialmente diseñados para que esto no suceda, ya que el sistema de cámaras y sensores debería avisar cualquier peatón en la vía, obstáculo, animal o potencial choque con otro auto.
¿Cómo funciona el modelo predictivo de Uber autónomo para no chocar a peatones o sufrir accidentes?
Vamos enumerando algunas de las funciones que utiliza Uber para que sus vehículos sin conductores no sufran contratiempos:
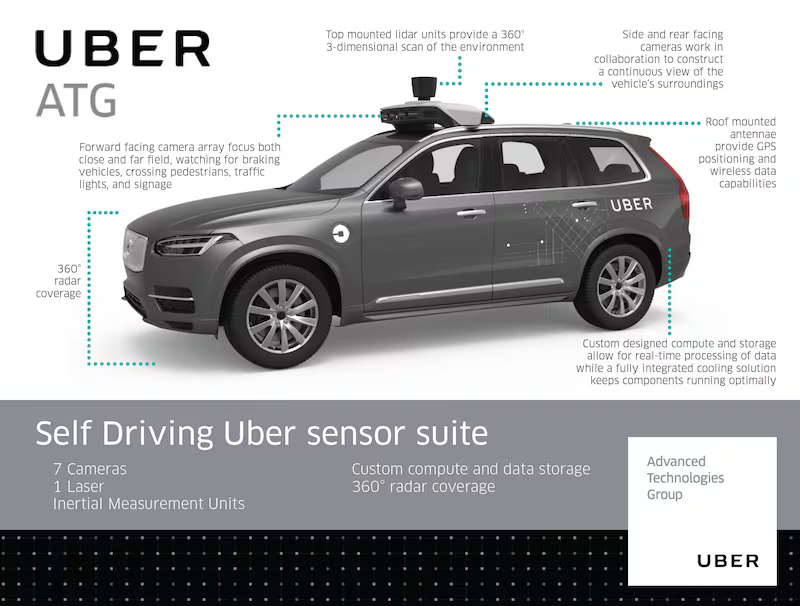
- Radar en la parte superior: produce una imagen en 3D del entorno del automóvil varias veces por segundo. Utilizando pulsos láser infrarrojos que rebotan en los objetos y regresan al sensor, puede detectar objetos estáticos y en movimiento con gran detalle, de día o de noche. Quizás la niebla y la nieve pueden obstaculizar un poco esta herramienta.
- Radar en la parte frontal: Utiliza ondas de radio en lugar de luz. Resiste mejor la interferencia, por eso es mejor en caso de niebla o nieve. Está diseñada para tener un alcance a 360 grados y puede desviar su curso cuando hay autos u objetos cerca.
- Cámaras ópticas de corto y largo alcance: Las cámaras del vehículo Uber observan patrones reveladores que indican vehículos de frenado (luces rojas repentinas), semáforos, peatones que cruzan, etc. Especialmente en la parte delantera del automóvil, se usarían múltiples ángulos y tipos de cámara para obtener una imagen completa de la escena en la que el automóvil está conduciendo.
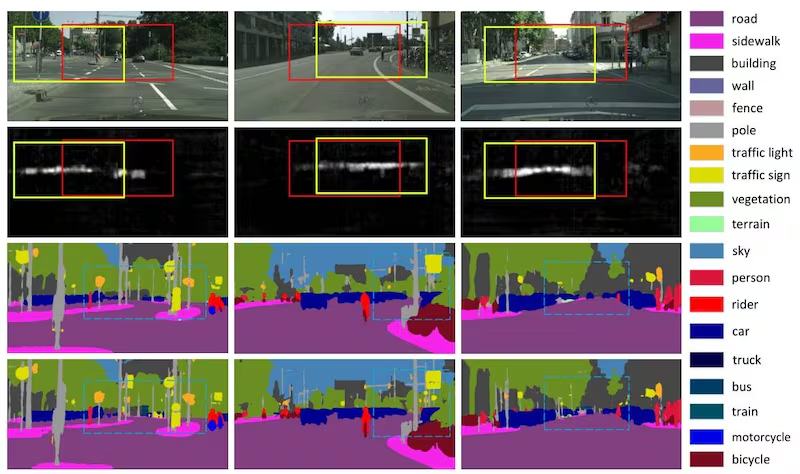
Acá la detección de personas es uno de los problemas más comunes de visión artificial, y los algoritmos que lo hacen se han vuelto bastante buenos. «Segmentar» una imagen, implica identificar cosas como carteles, árboles, aceras y más.
- Conductor de seguridad: unidad central de computación que toma la información de estas fuentes y crea su propia representación más completa del mundo que rodea el automóvil. Esto va más allá del simple reconocimiento de objetos y comienza a traer conceptos más amplios de inteligencia tales como la permanencia del objeto, la predicción de acciones y similares.


